Главная
Лабораторная
работа
Кинематическое
исследование и определение кпд планетарного редуктора
1. Цель работы
-
Кинематическое исследование редуктора и изображение его схемы.
-
Построение графиков зависимости ![]() при
при ![]() и
и ![]() при
при ![]() .
.
2. Теоретические
положения
1. Кинематическое исследование.
Модуль цилиндрических прямозубых колес (изготовлены
без смещения инструмента) определяется по формуле
![]()
где da – диаметр вершин зубьев
колеса (или шестерни), мм;
z –
число зубьев колеса (или шестерни).
Передаточное отношение планетарного редуктора
определяется по формуле Виллиса
![]()
где ![]() – передаточное отношение от центрального колеса z1 к водилу Н
при неподвижном колесе z2;
– передаточное отношение от центрального колеса z1 к водилу Н
при неподвижном колесе z2;
![]() – передаточное отношение от центрального колеса z1 к неподвижному колесу z2 при остановленном водиле Н:
– передаточное отношение от центрального колеса z1 к неподвижному колесу z2 при остановленном водиле Н:
![]()
2. Определение КПД редуктора.
Потери энергии в зубчатых передачах в основном
складываются из потерь:
– на трение в зацеплении;
– на разбрызгивание масла;
– в подшипниках.
В данном случае потерь на разбрызгивание масла нет,
так как редуктор – открытый, без смазки.
Определение КПД редуктора основано на одновременном и
независимом измерении крутящих моментов на входном T1 и
выходном T2 валах
редуктора.
Общий КПД редуктора определяется по формуле
![]()
где Т1 – крутящий момент на валу электродвигателя,
Нмм;
Т2 – крутящий
(тормозной) момент на выходном валу редуктора, Нмм;
![]() – передаточное
отношение редуктора.
– передаточное
отношение редуктора.
Крутящие моменты Т1 и Т2 определяются по формулам:
![]()
![]()
где k1 и k2 – показания индикаторов.
Теоретически КПД
планетарного редуктора можно определить рассмотрев соотношение мощностей на входном
и выходном валах:
![]()
где Т1 и Т2 –
моменты на соответствующих звеньях;
η – КПД планетарной
передачи.
Разделим обе части уравнения
на ![]() , получим
, получим
![]()
Если
всем звеньям планетарной передачи придать вращение вокруг общей оси с угловой
скоростью – ![]() (т.е. применить
метод инверсии), то водило остановится и мы получим зубчатую передачу с
неподвижными осями. Тогда зубчатые колеса будут вращаться с угловыми
скоростями
(т.е. применить
метод инверсии), то водило остановится и мы получим зубчатую передачу с
неподвижными осями. Тогда зубчатые колеса будут вращаться с угловыми
скоростями
![]()
а уравнение мощностей этой передачи запишется
![]()
где ![]() – реактивный момент на
колесе 2;
– реактивный момент на
колесе 2;
![]() – КПД зубчатой
передачи.
– КПД зубчатой
передачи.
Разделив обе части уравнений на ![]() и обозначив
передаточное отношение зубчатой передачи через
и обозначив
передаточное отношение зубчатой передачи через ![]() получим
получим
![]()
Уравнение равновесия всех внешних моментов имеет вид
![]()
Подставляя в это уравнение
![]()
получим
![]()
откуда
![]()
где ![]() – КПД
зацеплений колес 1 и 3, 4 и 2 в предположении неподвижности водила Н. Для внешнего зацепления можно принять
– КПД
зацеплений колес 1 и 3, 4 и 2 в предположении неподвижности водила Н. Для внешнего зацепления можно принять
![]()
Изложенный
метод расчета КПД планетарных передач не учитывает потерь на трение во вращательной
кинематической паре водила, коэффициент потерь в которой обычно сравнительно
мал (2…3 %).
3.
Основные правила по технике безопасности
- Включение установки производить с разрешения
преподавателя.
- Прибор должен подключаться к сети через выпрямитель.
- При работающей установке крышка редуктора должна
быть закрыта.
- После окончания работы установку от сети отключить.
4.
Описание установки
Установка ДП-5К смонтирована на
металлическом основании (рис. 1) и
состоит из электродвигателя 3 с тахометром
2, нагрузочного устройства 6 (магнитный порошковый тормоз) и испытуемого
планетарного редуктора 5. Входной и
выходной валы редуктора при помощи упругих муфт соединены с валами электродвигателя
и нагрузочного устройства. На кронштейнах смонтированы измерительные
устройства, состоящие из индикаторов 4
и 7, штоки которых упираются в
плоские пружины. Статор электродвигателя установлен в подшипниках качения
и может поворачиваться относительно оси, совпадающей с осью якоря. При работе
электродвигателя на статор действует реактивный момент в направлении,
противоположном вращению якоря. Такой двигатель называется балансирным.
На
панели управления (рис.1) размещены тумблер 11
для включения и
выключения электродвигателя; ручка 10 потенциометра,
позволяющая бесступенчато регулировать частоту вращения электродвигателя;
сигнальная лампочка, загорающаяся при включении
электродвигателя; тумблер 9,
включающий нагрузочное устройство, и ручка потенциометра 8 для регулировки тормозного момента.
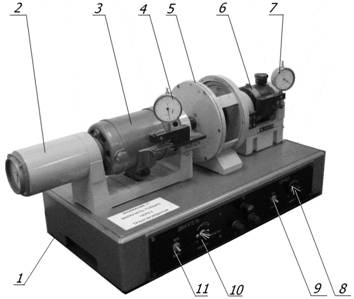
Рис. 1. Установка ДП–5К: 1 – корпус; 2 – тахометр;
3 – электродвигатель; 4, 7
– индикаторы;
5 – редуктор планетарный; 6 – тормоз порошковый (нагрузочное
устройство);
8 – ручка регулирования нагрузки; 9 – тумблер включения нагрузочного
устройства; 10 – ручка регулирования
частоты вращения электродвигателя;
11 – тумблер включения
электродвигателя
Исследуемый планетарный зубчатый редуктор (рис. 2)
состоит из центральных колес 1 (z1 = 17) и 2 (z2 = 87),
водила Н и установленных в нем двух
осей сателлитов, состоящих из колес 3 (z3 = 87) и 4 (z4 =
17).
При
вращении центрального колеса 1
крутящий момент передается на сателлиты 3
и 4, которые жестко закреплены на одной
оси и вращаются с постоянной угловой скоростью. Сателлит 4 обкатывается вокруг неподвижного центрального колеса 2 и приводит во вращение водило Н.
Момент Т1,
развиваемый электродвигателем, передается на редуктор и затем на нагрузочное
устройство, создающее момент сопротивления Т2.
Нагрузочное
устройство, как и электродвигатель, имеет балансирную систему. Статор представляет
собой электромагнит, а ротор – железный цилиндр. Магнитный зазор между ними
заполнен смесью карбонильного железа с минеральным маслом. При подаче тока в
обмотку электромагнита магнитная смесь оказывает сопротивление вращению ротора.
Для
измерения величины момента, развиваемого электродвигателем, к статору
прикреплен рычаг, который нажимает на плоскую пружину измерительного
устройства. Деформация пружины фиксируется индикатором часового типа. Если
пружину предварительно протарировать, т.е.
установить зависимость показаний индикатора от момента Т1, поворачивающего статор, то при выполнении опыта по
показаниям индикатора
можно судить о величине момента Т1 двигателя.
В результате тарировки измерительного устройства
электродвигателя установлена величина тарировочного коэффициента
![]()
Аналогично определена величина тарировочного
коэффициента для нагрузочного устройства:
![]()
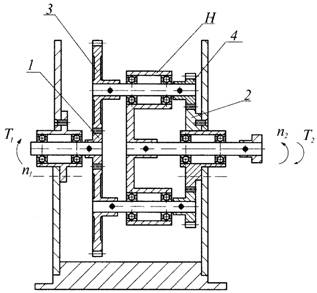
Рис. 2. Планетарный зубчатый редуктор: 1, 2
– центральное колесо; 3, 4 – сателлит; Н – водило

а) б) в) г) д)
Рис. 3. Условные обозначения на схемах по ГОСТ
2.770-68 и 2.703-68: а – передача
зубчатая (цилиндрическая) с внешним зацеплением (без уточнения типа зубьев);
б – блок зубчатых колес в подшипнике (без уточнения
типа); в – подшипники качения радиальные
(общее обозначение); г – соединение
валов эластичное; д – подшипники
скольжения радиальные
5.
Методика проведения испытаний и обработка результатов
1. Кинематическое
исследование редуктора.
Снять с редуктора откидную
крышку из органического стекла.
Вычертить кинематическую
схему редуктора и обозначить все зубчатые колеса, для чего использовать условные
обозначения, показанные на рис. 3.
Замерить диаметр вершин
любого зубчатого колеса и определить модуль (число зубьев колес дано в описании
прибора). Модуль уточнить по ГОСТ 9563-60.
Определить передаточное
отношение редуктора, а затем по показаниям тахометра проверить частоту вращения
выходного вала.
2. Определение KПД
редуктора.
В редукторе поставить на
место откидную крышку из органического стекла.
Получить разрешение
руководителя на включение прибора.
Включить
электродвигатель и, вращая ручку потенциометра, установить по тахометру заранее
заданную частоту вращения электродвигателя (номинальная частота вращения
электродвигателя 1000 мин–1).
Установить индикаторы
измерительных устройств электродвигателя и тормоза на «ноль».
Включить нагрузочное устройство
и поворотом ручки потенциометра по показаниям индикатора установить величину тормозного
момента Т2.
При падении частоты вращения
электродвигателя ручкой потенциометра электродвигателя вновь восстановить ранее
принятую частоту вращения.
По показаниям индикатора
измерительного устройства электродвигателя определить величину момента на его
валу.
Поворотом ручки
потенциометра нагрузочного устройства увеличить момент Т2 (через интервал 10…20
делений индикатора), затем снова снять показания измерительного устройства
электродвигателя. Опытные данные и результаты расчетов занести в табл. 1
отчета. Опыт повторить 5-6 раз. При этом все время поддерживать постоянную
частоту вращения электродвигателя.
Построить график ![]() при
при ![]() .
.
Аналогичным образом провести
опыты при ![]() и переменной частоте вращения. Опытные данные
и результаты расчетов занести в табл. 2 отчета.
и переменной частоте вращения. Опытные данные
и результаты расчетов занести в табл. 2 отчета.
Построить график зависимости
![]() при
при ![]() .
.
После проведения
лабораторной работы выключить установку.
6.
Содержание и оформление отчета
6.1 Титульный лист.
6.2 Цель работы.
6.3 Кинематическая схема установки.
6.4. Результаты измерения и
расчета параметров колес и редуктора
Число зубьев z1 -
Диаметр вершин da, мм -
Модуль т, мм, по формуле (1) -
Передаточное отношение ![]() по формуле (2) -
по формуле (2) -
Таблица 1. Опытные данные и результаты расчетов
|
Определяемые
|
№
отсчетов |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
К1, делений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К2, делений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
График зависимости ![]() при
при ![]()
|
η T2,
Нмм |
Таблица 2. Опытные данные и результаты расчетов
|
Определяемые
|
№
отсчетов |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
К1 делений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
График зависимости ![]() при
при ![]()
|
η n,
мин-1 |
7.
Вопросы для самоконтроля
1. Что такое планетарная
передача?
2. Какие достоинства и
недостатки имеют планетарные передачи по сравнению с зубчатыми передачами с неподвижными
осями?
3. Какие потери имеются в
планетарных передачах?
4.
Каковы наиболее эффективные меры по снижению потерь в передачах?
5. Для
чего необходимо знать КПД механизма, что он характеризует?
6. Как влияет увеличение
степени точности зубчатых колес на КПД передачи?
7. Расскажите устройство и принцип действия установки
ДП – 5К.
8. Как определить теоретическое значение КПД?
9. В чем отличие планетарного редуктора от
цилиндрического?
10. Объясните принцип измерения вращающих моментов.
11. Поясните принцип работы нагрузочного устройства.
12. От чего зависит КПД редуктора?
13. Как определить передаточное отношение планетарного
редуктора?
14. Как определить КПД редуктора опытным путем?
15. Нарисуйте кинематическую схему установки.
16. Воспроизведите порядок проведения лабораторной
работы.
17. Каково назначение нагрузочного устройства.
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Строительная механика Теория машин и механизмов