Главная
Лабораторная
работа
Определение кпд многоступенчатого редуктора
1. Цель работы
- Определение геометрических параметров зубчатых колес
и передач и вычисление передаточных чисел.
- Изображение кинематической схемы редуктора.
- Построение графиков зависимости ![]() при
при ![]() и
и ![]() при
при ![]() .
.
2. Теоретические
положения
1. Кинематическое исследование.
Передаточное число редуктора, состоящего из i пар
последовательно зацепляющихся колес, равно произведению передаточных чисел
отдельных пар колес:
![]()
Передаточное число пары зубчатых колес
![]()
где z2 и z1 –
соответственно число зубьев колеса и шестерни.
Диаметр вершин зубчатого колеса
![]()
отсюда
![]()
Межосевое
расстояние зубчатой пары
![]()
2. Определение КПД редуктора.
Потери энергии в зубчатых передачах в основном
складываются из потерь на трение в зацеплении и в подшипниках на разбрызгивание
масла.
В данном случае потерь на разбрызгивание нет,
поскольку редуктор состоит из открытых передач.
Определение КПД редуктора основано на одновременном и
независимом измерении крутящих моментов T1 на входном и T2 на выходном валу редуктора (см. рис. 1).
КПД редуктора можно определить по уравнению
![]()
где T1 – крутящий момент на валу электродвигателя;
T2 –
крутящий момент на выходном валу редуктора;
uоб –
передаточное число редуктора.
Опытные значения крутящих моментов определяются по
зависимостям
![]()
![]()
где ![]() и
и ![]() – тарировочные
коэффициенты;
– тарировочные
коэффициенты;
k1 и k2 –
соответственно показания индикаторов измерительных устройств электродвигателя и
тормоза.
Общий КПД механизма, состоящего
из i пар последовательно зацепляющихся колес, равен произведению КПД
отдельных пар колес:
![]()
Если потери в каждой паре
примерно одинаковы, то ![]() , где η – КПД
одной зубчатой пары (с учетом потерь в подшипниках).
, где η – КПД
одной зубчатой пары (с учетом потерь в подшипниках).
Таким образом,
![]()
3.
Основные правила по технике безопасности
- Включение установки производить с разрешения
преподавателя.
- Установка должна подключаться к
выпрямителю, а выпрямитель – к сети.
- При работающей установке крышка редуктора должна
быть закрыта.
- После окончания работы установку от сети отключить.
4.
Описание установки
На литом основании 1
(рис. 1) смонтированы исследуемый редуктор 8,
электродвигатель (балансирный) 5 с
тахометром 3 и нагрузочное устройство
11 (магнитный порошковый тормоз).
Входной и выходной валы редуктора соединены с валами электродвигателя и
нагрузочного устройства упругими муфтами 7
и 9. Тахометр соединен с электродвигателем
муфтой 4. На кронштейнах 2 и 12
смонтированы измерительные устройства, состоящие из плоских пружин, индикаторов
6 и 10, штоки которых упираются в пружины.
На панели 13
размещены тумблер 17, включающий и
выключающий электродвигатель; потенциометр 16,
позволяющий бесступенчато регулировать частоту вращения электродвигателя;
тумблер 15, включающий нагрузочное
устройство, и потенциометр 14,
позволяющий регулировать тормозной момент Т2.
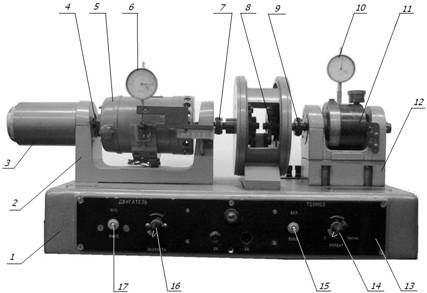
Рис. 1. Установка ДПЗК ТС: 1 – основание; 2, 12 – кронштейны; 3 – тахометр; 4, 7, 9
– муфты; 5 – электродвигатель;
6, 10 –
индикаторы; 8 – редуктор
многоступенчатый; 11 – тормоз
порошковый; 13 – панель управления; 14 – ручка регулирования нагрузки; 15 – тумблер включения нагрузочного
устройства; 16 – ручка регулирования
частоты вращения электродвигателя; 17
– тумблер включения электродвигателя
Статор электродвигателя установлен в подшипниках
качения так, что он может качаться относительно оси, совпадающей с осью якоря.
Возникающий при работе электродвигателя реактивный момент полностью передается
на статор и действует в направлении, противоположном вращению якоря. Такой
электродвигатель называется балансирным.
Для измерения величины момента, развиваемого
электродвигателем, к статору прикреплен рычаг, который нажимает на плоскую
пружину измерительного устройства. Деформация пружины передается на шток
индикатора. По отклонению стрелки индикатора можно судить о величине этой
деформации. Если пружину протарировать, т.е. установить зависимость момента T1, поворачивающего статор, и числа делений индикатора,
то при выполнении опыта можно по показаниям индикатора судить о величине
момента T1 электродвигателя.
В результате тарировки измерительного устройства электродвигателя
установлена величина тарировочного коэффициента
![]()
Аналогичным способом определяется тарировочный
коэффициент для тормозного устройства:
![]()
5. Методика проведения
испытаний и обработка результатов
1. Подсчитать количество зубьев шестерен и колес,
измерить диаметры вершин зубьев da1
и da2.
Результаты расчетов и измерений занести в табл. 1 отчета.
2. По данным табл. 1 отчета построить кинематическую
схему редуктора, для чего использовать условные обозначения, показанные на рис.
2.
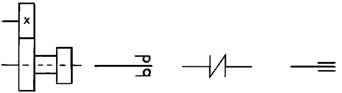
а) б) в) г)
Рис. 2. Условное обозначение на схемах по ГОСТ
2.770-68 и ГОСТ 2.703-68:
а – передачи зубчатые цилиндрические с прямыми зубьями
(шестерня установлена на валу неподвижно.
Блок свободно вращается на оси); б – подшипники качения шариковые радиальные (общее обозначение);
в – соединение валов эластичное; г – подшипники радиальные
3. Включить электродвигатель и
поворотом ручки 16 потенциометра
установить частоту вращения вала электродвигателя n = 700 мин–1.
4. Установить стрелки индикаторов в нулевое положение.
5. Поворотом ручки потенциометра 14 нагружать редуктор моментами различной величины.
Снятие показаний индикатора измерительного устройства
электродвигателя должно производиться при выбранной постоянной частоте вращения
электродвигателя.
6. Записать в табл. 1 отчета показания индикаторов.
7. По формулам (5), (6) и (7)
вычислить значения T1, T2 и ![]() . Результаты вычислений занести в ту же таблицу.
. Результаты вычислений занести в ту же таблицу.
8. По данным табл. 1 отчета построить график ![]() при
при ![]() .
.
9. Аналогичным образом провести опыты при ![]() и переменной
частоте вращения электродвигателя. Опытные данные и результаты расчетов занести
в табл. 2 отчета.
и переменной
частоте вращения электродвигателя. Опытные данные и результаты расчетов занести
в табл. 2 отчета.
10. Построить график зависимости ![]() при
при ![]() .
.
6.
Содержание и оформление отчета
6.1 Титульный лист.
6.2 Цель работы.
6.3 Кинематическая схема установки.
6.4.
Результаты измерений и расчета параметров колес и редуктора
Число
зубьев -
Диаметр
вершин зубьев dа, мм -
Модуль
m по
формуле (3), мм -
Межосевое
расстояние aw по формуле (4), мм -
Передаточное
число u по формуле (2) -
Общее
передаточное число по формуле (1) -
Таблица 1.
Опытные данные и результаты расчетов
|
Определяемые |
№ отсчетов |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
k1,
делений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k2, делений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
График зависимости ![]() при
при ![]()
|
η T2,
Нмм |
Таблица 2. Опытные данные и результаты расчетов
|
Определяемые |
№ отсчетов |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
k1, делений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
График зависимости ![]() при
при ![]()
|
η n,
мин-1 |
7.
Вопросы для самоконтроля
1. Какие потери имеются в зубчатой передаче и каковы
наиболее эффективные меры по понижению потерь в передаче?
2. Сущность относительных, постоянных и нагрузочных
потерь.
3. Как изменяется КПД передачи в зависимости от
передаваемой мощности?
4. Почему КПД с возрастанием степени точности зубчатых
колес и передач повышается?
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Строительная механика Теория машин и механизмов