Фотография 44
|
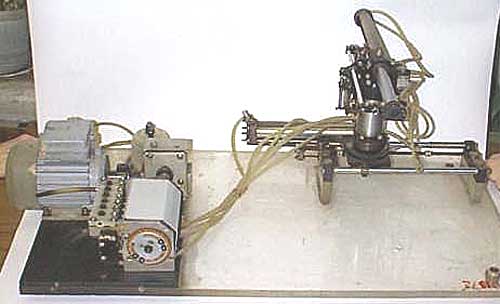
Трехподвижный промышленный робот ПР5-2 с декартовой (прямоугольной) системой координат, с пневмоприводом и управлением от кулачкового распределительного вала. |
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Строительная механика Теория машин и механизмов